SPIV
立體式質點影像測速法(Stereoscopic Particle Image Velocimetry,SPIV)
質點影像測速法(Particle Image Velocimetry,PIV):使用光學設備雙脈衝雷射(double pulsed laser)發出兩道時間間隔為Δt的光束,光束經過圓柱透鏡組展開成片狀光頁(light sheet)照射進測量區域,而試驗流體環境中需施放合宜濃度之顆粒(Particle),顆粒隨流體運動進入雷射光頁,顆粒發生散射由相機捕捉到間隔Δt的兩張影像,每張影像將切割成數等份的小區塊,兩張影像同等位置的區塊影像將進行相關性分析(Correlation analysis),找出顆粒的移動向量Δx,再藉由先前拍攝的校正板進行尺度的轉換,因為是間隔Δt的時間拍攝的,所以可以再得到速度,每個區塊的速度知道後就可以知道拍攝位置的速度場、流體流動狀況及其他物理量。[1]
PIV原理(採自LaVision 公司的網頁內容)[3]
SPIV 是一種非侵入式(non-invasive)、二維(2-dimensional,2D)、三分量(3-component,3C)的流場量測技術;2D 代表量測區域為一2D 平面,3C 代表量測標的為速度向量全部的3 個分量。因此,SPIV 是一種有別於單點式(single-point)的場域式(field)量測技術,使我們能夠獲得流速的完整三維資訊,也就是2D-3C 的瞬時(instantaneous)速度場。經過長時間的採樣量測,累積足夠多、具有統計意義數量的瞬時速度場,即可進行系集平均(ensemble averaging,等同於Reynolds averaging) 而得到平均速度場(mean velocity field);再進行雷諾分解(Reynolds decomposition) 以得到速度分量振盪量(velocity component fluctuations),彼此相乘後再加以系集平均即形成雷諾應力張量(Reynolds stress tensor),進而組成紊流動能(turbulent kinetic energy,TKE)或紊流強度(turbulence intensity,TI),共同呈現出紊流場特性。[2]
SPIV 是利用兩台CCD相機,如同人的雙眼一般地分別由兩側同時觀測流場,即可解析在光頁面上流場速度向量完整的三個分量(兩個in-plane 分量和1 個out-of-plane 分量)。[2]
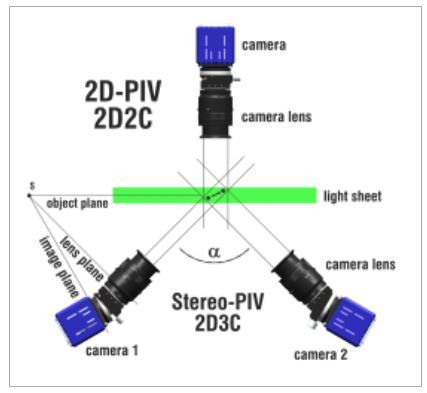
SPIV之關鍵原理:如同人的兩隻眼睛注視同一目標物而能解析深度方向(out-of-plane)之訊息(採自LaVision 公司的網頁內容)[3]
SPIV 的成功關鍵在於其三維校正程序(3D calibration),其校正程序如下所述:LaVision 的SPIV系統使用一表面有高度落差的圓點陣列校正板(calibration target)進行SPIV 校正,該校正板乃用於立體攝像系統之影像校正程序,用於調校測量面和標記物之間的間距。[2]
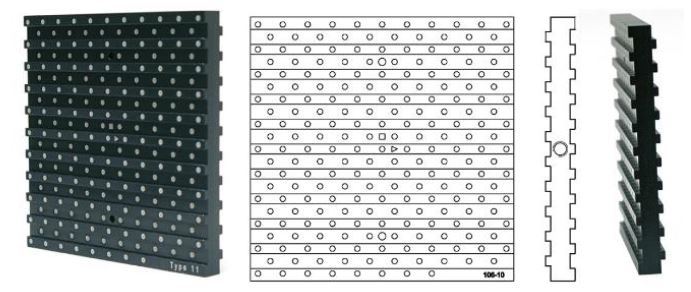
校正板之立體示意圖(採自LaVision 公司的網頁內容)[3]
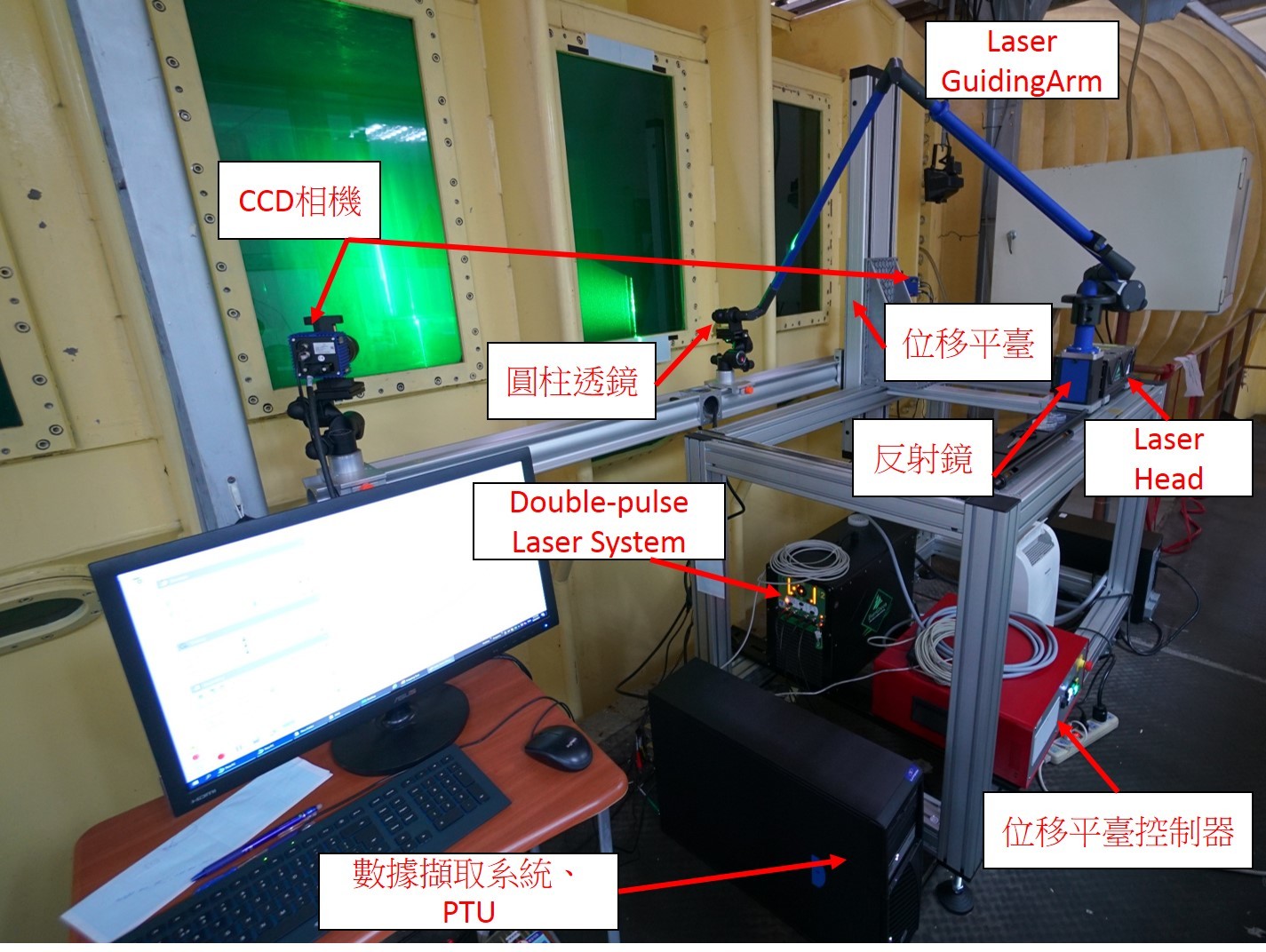
SPIV System in LCT
[1]王建閎 (2021)。空蝕水槽螺槳單獨試驗之探討。國立臺灣海洋大學系統工程暨造船學系碩士論文。
[2]楊鈞堯(C.Y. Yang);李耀輝(Y.H. Lee);陳建宏(J.H. Chen);吳俊賢(J.S. Wu);魏志宇(C.Y. Wei);周一志(Y.C. Chow) (2019)。國立臺灣海洋大學大型空蝕水槽大尺度流場SPIV量測。中國造船暨輪機工程學刊 38卷2期。
[3] LaVision 。 http://www.lavision.de/en/